
ビデオ
概要
TP-TGXG-200自動ボトルキャッピングマシンは、ボトルにキャップを自動で締め付けるために使用されます。食品、医薬品、化学業界など、幅広い分野で広く利用されています。通常のボトルやスクリューキャップなど、形状、材質、サイズに制限はありません。連続キャッピング方式のため、TP-TGXG-200は様々な包装ラインの速度に適応できます。このマシンは多目的に使用でき、幅広い用途に使用でき、操作も簡単です。従来の断続駆動方式と比較して、TP-TGXG-200はより高効率で、よりタイトな締め付けが可能で、キャップへのダメージも少なくなっています。
応用
自動キャッピングマシンは、さまざまなサイズ、形状、材質のスクリューキャップ付きボトルに使用できます。
A. ボトルサイズ
直径20~120mm、高さ60~180mmのボトルに適しています。ただし、この範囲外のボトルサイズにもカスタマイズ可能です。

B. ボトルの形状
自動キャッピングマシンは、丸型、四角型、複雑な形状など、さまざまな形状に適用できます。




C. ボトルとキャップの材質
ガラス、プラスチック、金属など、どんなものでも自動キャッピングマシンですべて処理できます。


D. スクリューキャップタイプ
自動キャッピングマシンは、ポンプ、スプレー、ドロップキャップなど、あらゆる種類のスクリューキャップをねじ込むことができます。



E. 産業
自動キャッピングマシンは、粉体、液体、顆粒の包装ライン、食品、医薬品、化学など、あらゆる産業に導入できます。スクリューキャップがあるところならどこでも、自動キャッピングマシンが活躍します。
建設と作業プロセス
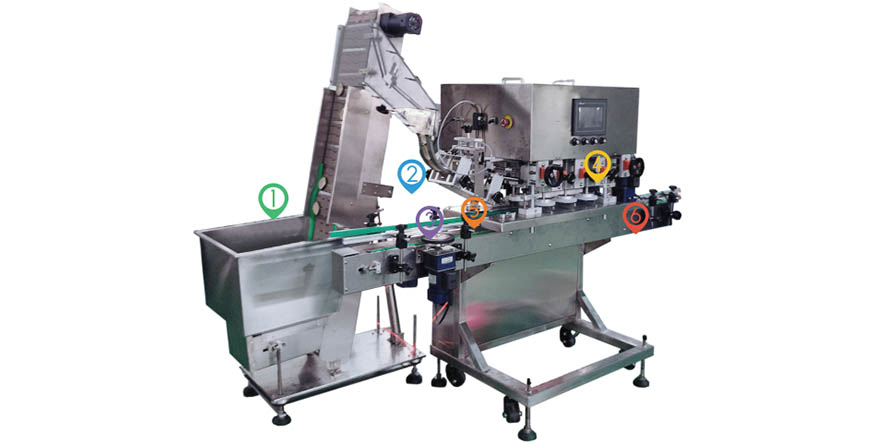
キャッピングマシンとキャップフィーダーで構成されています。
1. キャップフィーダー
2. キャップの取り付け
3. ボトルセパレーター
4. キャッピングホイール
5. ボトルクランプベルト
6. ボトル搬送ベルト
以下は作業プロセスです
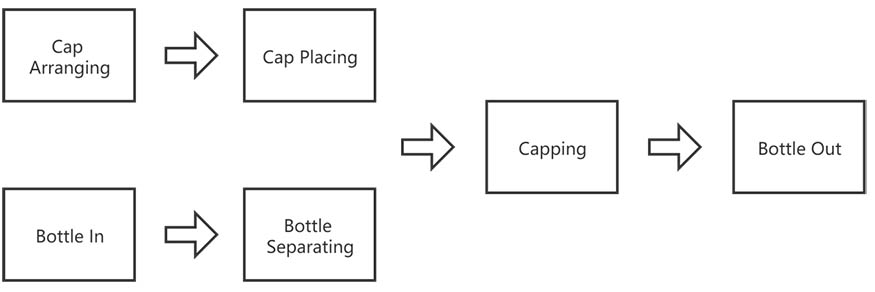
特徴
■ 様々な形状・材質のボトルやキャップに幅広く使用されています。
■ PLC&タッチスクリーン制御、操作が簡単。
■ 操作と調整が簡単で、人的資源と時間コストを大幅に節約できます。
■ 高速かつ調整可能な速度で、あらゆる梱包ラインに適しています。
■ 安定した性能と高精度。
■ ワンボタンスタート機能で利便性が高まります。
■ 詳細な設計により、マシンはより人間的でインテリジェントになります。
■ 機械の外観に対する比率が良好で、デザイン性、外観のレベルが高い。
■ 本体はSUS304製でGMP基準を満たしています。
■ボトルと蓋の接触部分はすべて食品に安全な素材で作られています。
■ さまざまなボトルのサイズを表示するデジタル表示画面で、ボトルの交換に便利です(オプション)。
■ 誤ってキャップされたボトルを除去するオプトロニックセンサー(オプション)。
■ 蓋を自動的に送り込む段階式昇降装置。
■ 蓋落下部はエアーブローと重量測定によりエラー蓋を除去できます。
■ 蓋を押さえるベルトは傾斜がついているので、蓋を正しい位置に調整して押さえることができます。
知的
キャップの両側の中心バランスが異なる原理を利用し、正しい方向のキャップだけが上まで移動します。間違った方向のキャップは自動的に落下します。
コンベアがキャップを上に運んだ後、ブロワーがキャップをキャップ トラックに吹き込みます。

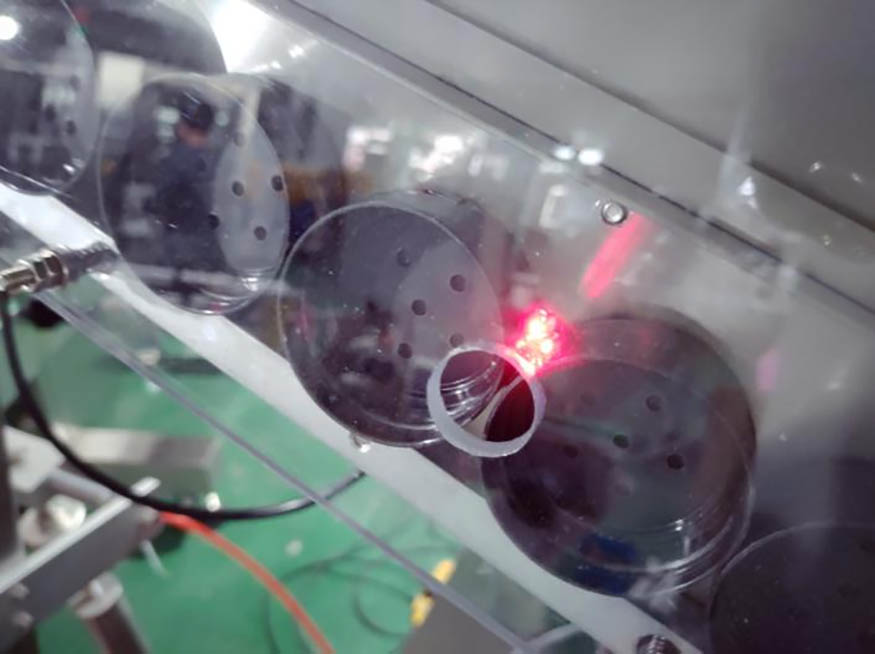
蓋の逆さを検知するエラー蓋センサーを搭載。自動エラー蓋取り外し装置とボトルセンサーにより、良好なキャップ閉め効果を実現。
ボトルセパレーターは、所定の位置でボトルの移動速度を調整することで、ボトル同士を分離します。丸型ボトルには通常1つのセパレーターが必要で、角型ボトルには2つのセパレーターが必要です。


キャップ不足検出装置は、キャップフィーダーの自動運転と停止を制御します。キャップトラックの両側に2つのセンサーがあり、1つはトラックにキャップが詰まっているかどうかを確認し、もう1つはトラックにキャップが空いているかどうかを検知します。
効率的
ボトルコンベアとキャップフィーダーの最大速度は 100 bpm に達し、さまざまな梱包ラインに適した高速マシンを実現します。
3対の車輪がキャップを素早く回して外します。それぞれの車輪には特定の機能があります。最初の車輪は逆回転することで、置きにくいキャップを正しい位置に配置できます。また、キャップが正常な状態であれば、2対の車輪と連動してキャップを下向きに回転させ、適切な位置に素早く移動させることができます。3対目の車輪はキャップを締めるためにわずかに調整するため、すべての車輪の中で最も遅い速度になっています。

便利
他のサプライヤーのハンドホイール調整と比較すると、1 つのボタンでキャッピング デバイス全体を上げたり下げたりする方がはるかに便利です。
左から右への4つのスイッチは、ボトルコンベア、ボトルクランプ、キャップクライミング、ボトル分離の速度を調整するために使用します。ダイヤルを操作すれば、各パッケージに適した速度を簡単に設定できます。


2本のボトルクランプベルト間の距離を簡単に変更できるハンドホイール。クランプベルトの両端にそれぞれ2つのホイールが付いています。ダイヤルを操作すれば、ボトルサイズを変更する際に正確な位置に調整できます。
キャッピングホイールとキャップ間の距離を調整するスイッチです。距離が近いほど、キャップはしっかりと締まります。ダイヤルで最適な距離を簡単に見つけることができます。

操作が簡単
シンプルな操作プログラムを備えた PLC とタッチ スクリーン制御により、作業がより簡単かつ効率的になります。


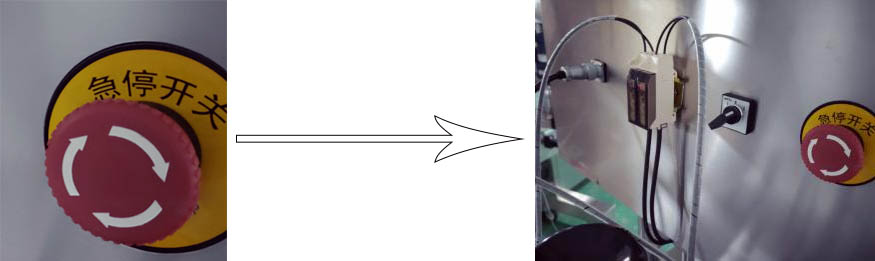
緊急時に直ちに機械を停止する緊急ボタンにより、オペレーターの安全が確保されます。
| TP-TGXG-200 ボトルキャッピングマシン | |||
| 容量 | 50~120本/分 | 寸法 | 2100*900*1800mm |
| ボトルの直径 | Φ22-120mm(ご要望に応じてカスタマイズ) | ボトルの高さ | 60~280mm(ご要望に応じてカスタマイズ) |
| 蓋のサイズ | Φ15-120mm | 正味重量 | 350kg |
| 適格レート | ≥99% | 力 | 1300W |
| マトライアル | ステンレス鋼304 | 電圧 | 220V/50-60Hz(またはカスタマイズ) |
| いいえ。 | 名前 | 起源 | ブランド |
| 1 | インバーター | 台湾 | デルタ |
| 2 | タッチスクリーン | 中国 | タッチウィン |
| 3 | オプトロニックセンサー | 韓国 | オートニクス |
| 4 | CPU | US | アトメル |
| 5 | インターフェースチップ | US | メキシコ |
| 6 | プレスベルト | 上海 |
|
| 7 | 直巻モータ | 台湾 | タライク/GPG |
| 8 | SS 304フレーム | 上海 | 宝鋼 |
自動キャッピング機は充填機やラベリング機と連動して梱包ラインを形成できます。
A. ボトルアンスクランブラー+オーガーフィラー+自動キャッピングマシン+ホイルシールマシン。
B. ボトルアンスクランブラー+オーガーフィラー+自動キャップマシン+ホイルシールマシン+ラベリングマシン


アクセサリー(箱入り)
■ 取扱説明書
■ 電気回路図と接続図
■ 安全操作ガイド
■ 消耗部品一式
■ メンテナンスツール
■構成一覧(由来、モデル、仕様、価格)



1. キャップエレベーターおよびキャップ配置システムの設置。
(1)キャップ配置検出センサーの設置。
キャップエレベーターとキャップ配置システムは出荷前に分離されています。キャッピングマシンを稼働させる前に、キャップ整列・配置システムをキャッピングマシンに取り付けてください。以下の図に示すようにシステムを接続してください。
キャップ抜け検査センサー(機械停止)
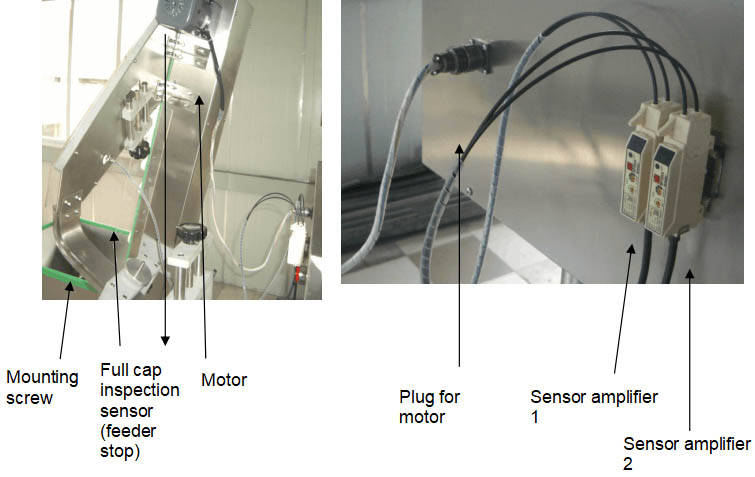
a. キャップ配置トラックとランプを取り付けネジで接続します。
b. モーターのワイヤーをコントロールパネルの右側にあるプラグに接続します。
c. フルキャップ検査センサーをセンサーアンプ1に接続します。
d. キャップ抜け検査センサーをセンサーアンプ2に接続します。
キャップクライミングチェーンの角度調整:キャップクライミングチェーンの角度は、出荷前にお客様からご提供いただいたサンプルキャップに合わせて調整されています。キャップの仕様を変更する必要がある場合(サイズのみ変更、キャップの種類は変更なし)、角度調整ネジでキャップクライミングチェーンの角度を調整してください。チェーンが上側に傾いているキャップのみを持ち上げられるようになります。調整方法は以下のとおりです。

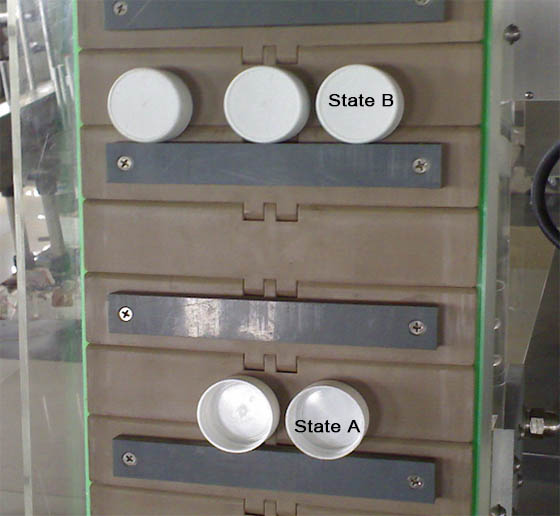
状態 A のキャップは、キャップ登りチェーンがキャップを上昇させるときの正しい方向です。
チェーンが適切な角度にある場合、状態 B のキャップは自動的にタンク内に落ちます。
(2)キャップ落下システム(シュート)を調整する
落下シュートの角度とスペースは、ご提供いただいたサンプルに基づいて既に設定されています。通常、ボトルやキャップの仕様変更がない場合は、設定を調整する必要はありません。ボトルやキャップの仕様が複数ある場合は、製造時に十分なスペースを確保できるよう、契約書または添付書類にその項目を記載してください。調整方法は以下の通りです。
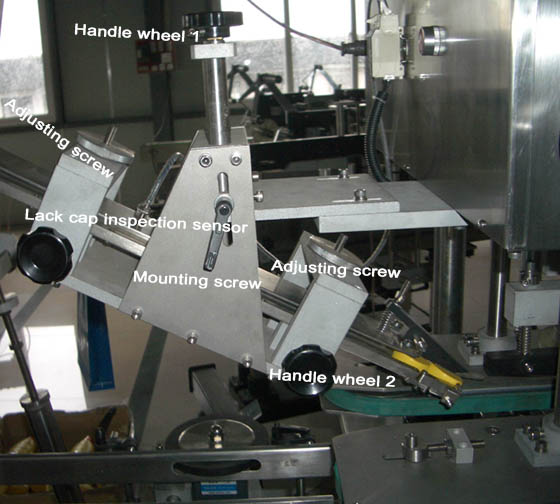
キャップ落下システムの高さを調整します。ハンドルホイール 1 を回す前に、取り付けネジを緩めてください。
調整ネジによりシュートのスペースの高さを調整できます。
ハンドルホイール2個(両側)でシュートのスペース幅を調整できます。
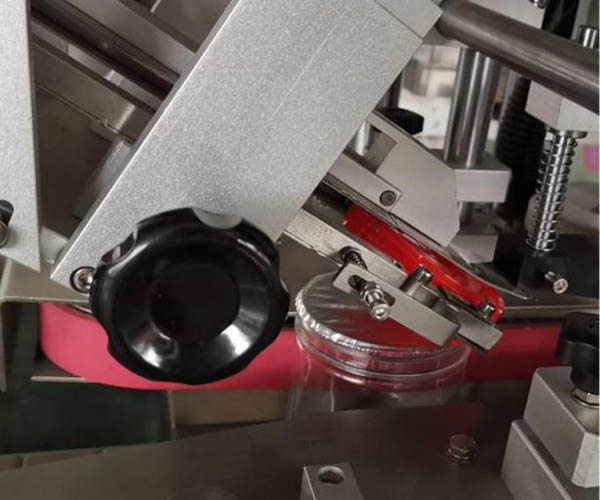
(3)キャップ押さえ部の調整
ボトルがキャッププレス部に送り込まれると、キャップはシュートから自動的にボトル口を覆います。キャッププレス部は、ボトルやキャップの高さに合わせて調整できます。キャップへの圧力が適切でないと、キャッピング性能に影響します。キャッププレス部の位置が高すぎると、プレス性能に影響します。また、位置が低すぎると、キャップやボトルが破損する可能性があります。通常、キャッププレス部の高さは出荷前に調整されています。高さを調整する必要がある場合は、以下の手順に従ってください。

キャップ押下部分の高さを調整する前に、取り付けネジを緩めてください。
最小のボトルにフィットするように、機械にはもう一つキャップを押す部分があり、その変更方法はビデオに示されています。
(4)空気圧を調整してキャップをシュートに吹き込む。

2.主要部品全体の高さを調整する。
ボトル固定機構、ゴム弾性スピンホイール、キャッププレス部品などの主要部品の高さは、機械エレベーターによって一括調整できます。機械エレベーターの操作ボタンは操作パネルの右側にあります。機械エレベーターを作動させる前に、2本の支柱の固定ネジを緩めてください。
øは下、øは上を意味します。スピンホイールの位置がキャップと一致していることを確認してください。調整後は、エレベーターの電源を切り、取り付けネジを締めてください。
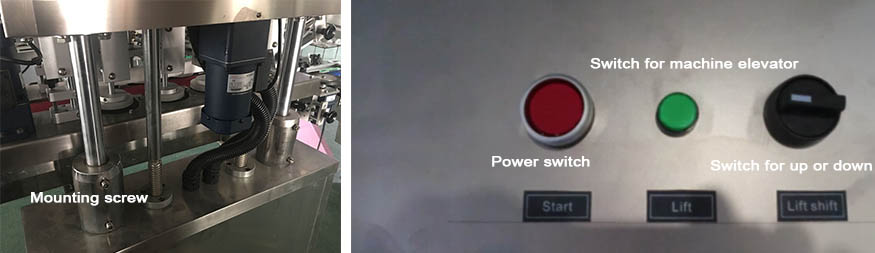
ご注意:正しい位置になるまで、エレベータースイッチ(緑)を押し続けてください。エレベーターの速度は非常に遅いため、しばらくお待ちください。
3. ゴム弾性スピンホイールを調整する(スピンホイールは3組)
スピンホイールの高さは機械のエレベーターによって調整されます。
スピンホイールの幅はキャップの直径に応じて調整されます。
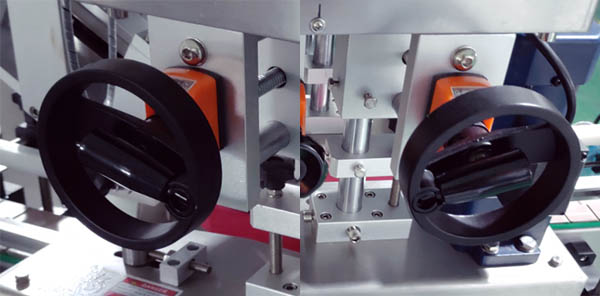
通常、一対のホイール間の距離はキャップの直径より2~3mm小さくなります。操作者はハンドルホイールBでスピンホイールの幅を調整できます(各ハンドルホイールは相対的なスピンホイールを調整できます)。
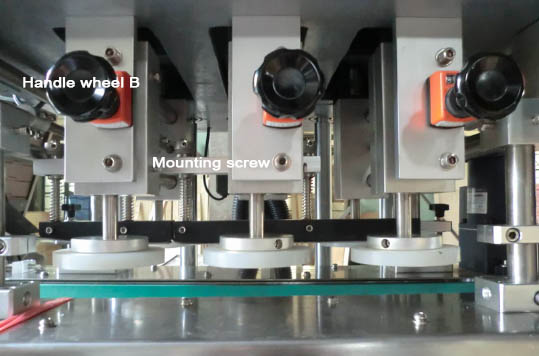
ハンドルホイールBを調整する前に、取り付けネジを緩めてください。
4.ボトル固定構造の調整。
ボトルの固定位置は、固定構造とリンク軸の位置を調整することで調整できます。固定位置がボトルに対して低すぎると、供給時やキャップ時にボトルが倒れやすくなります。逆に、固定位置がボトルに対して高すぎると、スピンホイールの正常な動作を妨げます。調整後は、コンベアとボトル固定構造の中心線が同一線上にあることを確認してください。

ハンドルホイールAを回す(両手でハンドルを回す)ことで、ボトル固定ベルト間の距離を調整できます。これにより、プレス工程中にボトルをしっかりと固定することができます。
ボトル固定ベルトの高さは通常、機械のエレベーターによって調整されます。
(注意: 4 リンク シャフトの取り付けネジを緩めた後、操作者は顕微鏡でボトル固定ベルトの高さを調整できます。)
固定ベルトを広範囲に動かす必要がある場合は、ネジ 1 とネジ 2 を一緒に緩めてベルトの位置を調整してください。また、ベルトの高さを狭い範囲で調整する必要がある場合は、ネジ 1 だけを緩めて調整ノブを回してください。

5. ボトルスペース調整ホイールと手すりを調整します。
ボトルの仕様を変更する際は、ボトル間隔調整ホイールとレールの位置を変更してください。間隔調整ホイールとレールの間隔は、ボトルの直径より2~3mm小さくする必要があります。調整後は、コンベアとボトル固定構造の中心線が一致していることを確認してください。
調整ネジを緩めるとボトルスペース調整ホイールの位置を調整できます。
緩めの調整ハンドルでコンベア両側の手すりの幅を調整できます。


